Table of Contents
Vector Differentials
The vector from the origin to the point $(x,y,z)$ is $$\rr=x\,\ii+y\,\jj+z\,\kk$$ and is called the position vector. A parametric curve can be described by viewing $x$, $y$, and $z$, and hence $\rr$, as functions of some parameter $u$. It is instructive to draw a picture showing the small change $\Delta\rr=\Delta x\,\ii+\Delta y\,\jj+\Delta z\,\kk$ in the position vector between nearby points. Try it!
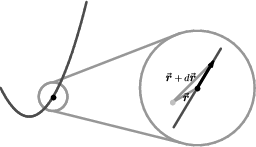
This picture is so useful that we will extend it one step further, and consider an infinitesimal change in position. What does this mean? Zoom in on the curve so much that it becomes straight, as illustrated in the figure above. Instead of $\Delta\rr$, we will write $d\rr$ for the vector between two points on the curve which are infinitesimally close together. For the moment, that's just notation.
Like any vector, $d\rr$ can be expanded with respect to $\ii$, $\jj$, $\,\kk$; the components of $d\rr$ are just the infinitesimal changes $dx$, $dy$, $dz$, in the $x$, $y$, and $z$ directions, respectively, that is \begin{equation} d\rr = dx\,\ii + dy\,\jj + dz\,\kk \label{drdef} \end{equation} “Dividing” this by $du$ leads to the derivative $${d\rr\over du} = {dx\over du}\,\ii + {dy\over du}\,\jj + {dz\over du}\,\kk$$ which could also have been constructed as a limit, namely $${d\rr\over du} = \lim_{\Delta u\to0} {\Delta\rr\over\Delta u}$$ You may find the intuitive notion of $d\rr$ as an infinitesimal vector displacement to be helpful in visualizing the geometry of vector calculus throughout this course. If you want to be more pedantic, you may view this as a purely formal manipulation, or as a definition of the vector differential $d\rr$, that is $$d\rr = {d\rr\over du} \,du$$ By construction, $d\rr\over du$, and hence also $d\rr$, is tangent to the curve — and if the parameter $u$ happens to be time $t$, then $d\rr\over dt$ is of course just the velocity.
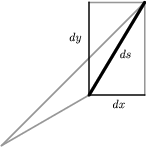
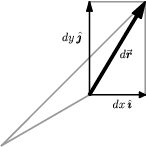
What is the infinitesimal distance $ds$ between nearby points on the curve? Just the length of $d\rr$! We have $$ds = |d\rr|$$ and “squaring” both sides leads to \begin{equation} ds^2 = d\rr\cdot d\rr = dx^2 + dy^2 + dz^2 \label{dsdef} \end{equation} which is just the infinitesimal Pythagorean Theorem, and which is shown (in two dimensions) in the first drawing above. The vector version of the same result is shown in the second drawing; this is just (\ref{drdef}) (restricted to two dimensions).
Other Coordinates
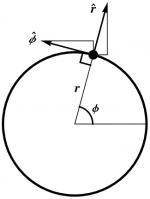
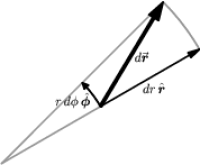
It is important to realize that $d\rr$ and $ds$ are defined geometrically, not by (\ref{drdef}) and (\ref{dsdef}). To emphasize this coordinate-independent nature of $d\rr$, it is useful to study $d\rr$ in another coordinate system, such as polar coordinates ($r$,$\phi$) in the plane. It is also natural to introduce basis vectors $\{\rhat,\phat\}$ adapted to these coordinates, with $\rhat$ being the unit vector in the radial direction, and $\phat$ being the unit vector in the direction of increasing $\phi$. 1)
Determining the lengths of the sides of the resulting infinitesimal polar “rectangle” yields \begin{equation} d\rr = dr\,\rhat + r\,d\phi\,\phat \label{drpolar} \end{equation} as shown in the second drawing below. Using (\ref{dsdef}) and again squaring both sides leads to \begin{equation} ds^2 = d\rr\cdot d\rr = dr^2 + r^2 \, d\phi^2 \label{dspolar} \end{equation} which is the infinitesimal Pythagorean Theorem in polar coordinates
A similar procedure can be used to determine $d\rr$ in cylindrical and spherical coordinates.
GOALS
- Know how to derive the formula for the vector differential $d\rr$ in standard coordinate systems (rectangular, polar, cylindrical, spherical).
- Know the resulting formulas for $d\rr$; these are worth memorizing.
- Know the relationship between $d\rr$ and infinitesimal arclength $ds$.
1)
One can of course relate $\rhat$ and $\phat$ to $\ii$ and $\jj$,
for instance using the first drawing in the figure at the bottom of the
page. However, in most physical applications (as opposed to problems in
calculus textbooks) this can be avoided by making an appropriate initial
choice of coordinates.